1. SMPLX Mesh Projection
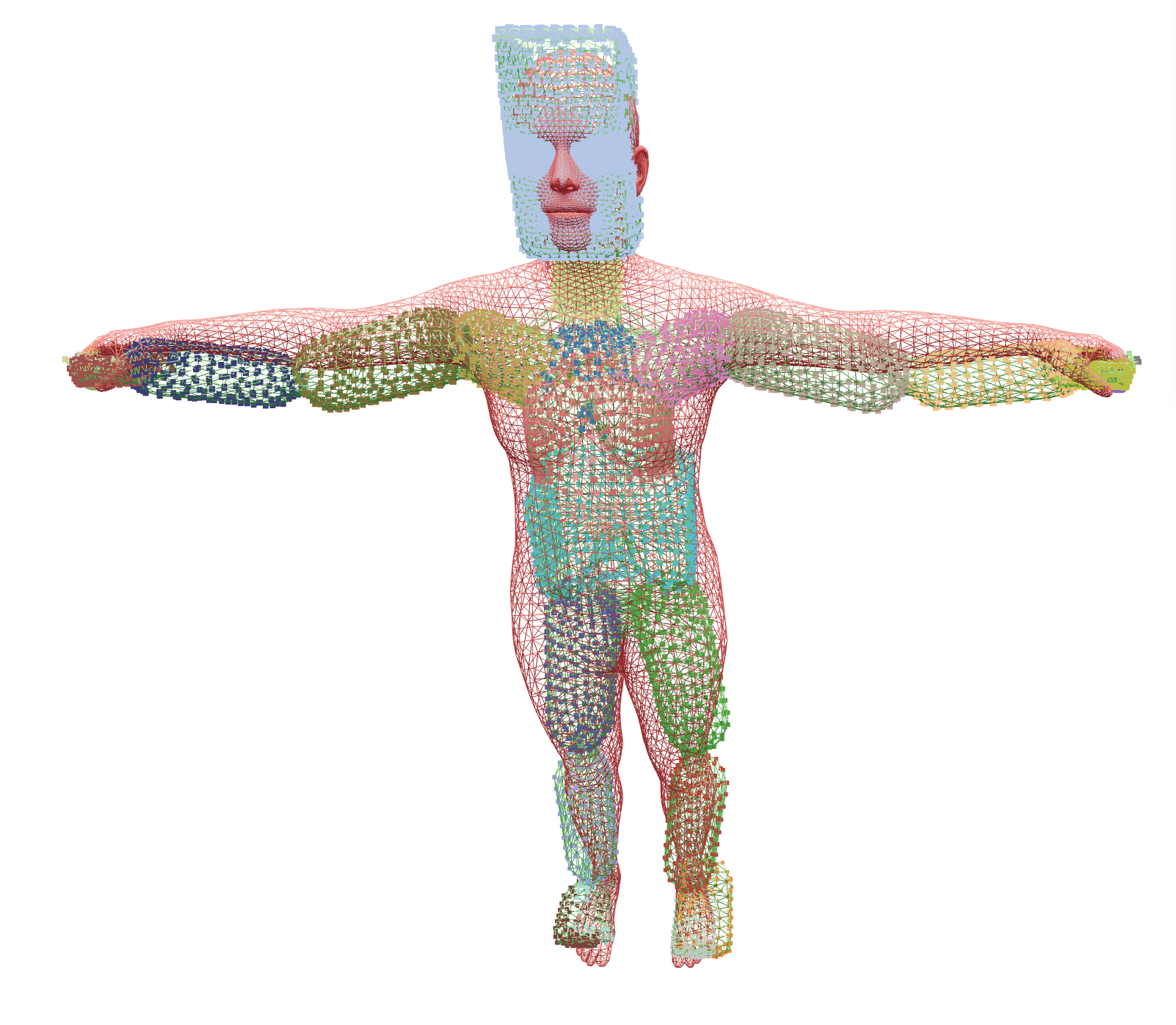
We project the SMPLX human mesh surface onto both the G1 robot mesh and SMPLX-fitted capsule primitives. This enables dense contact correspondence between human and robot body surfaces.
SMPLX to G1 Surface Projection
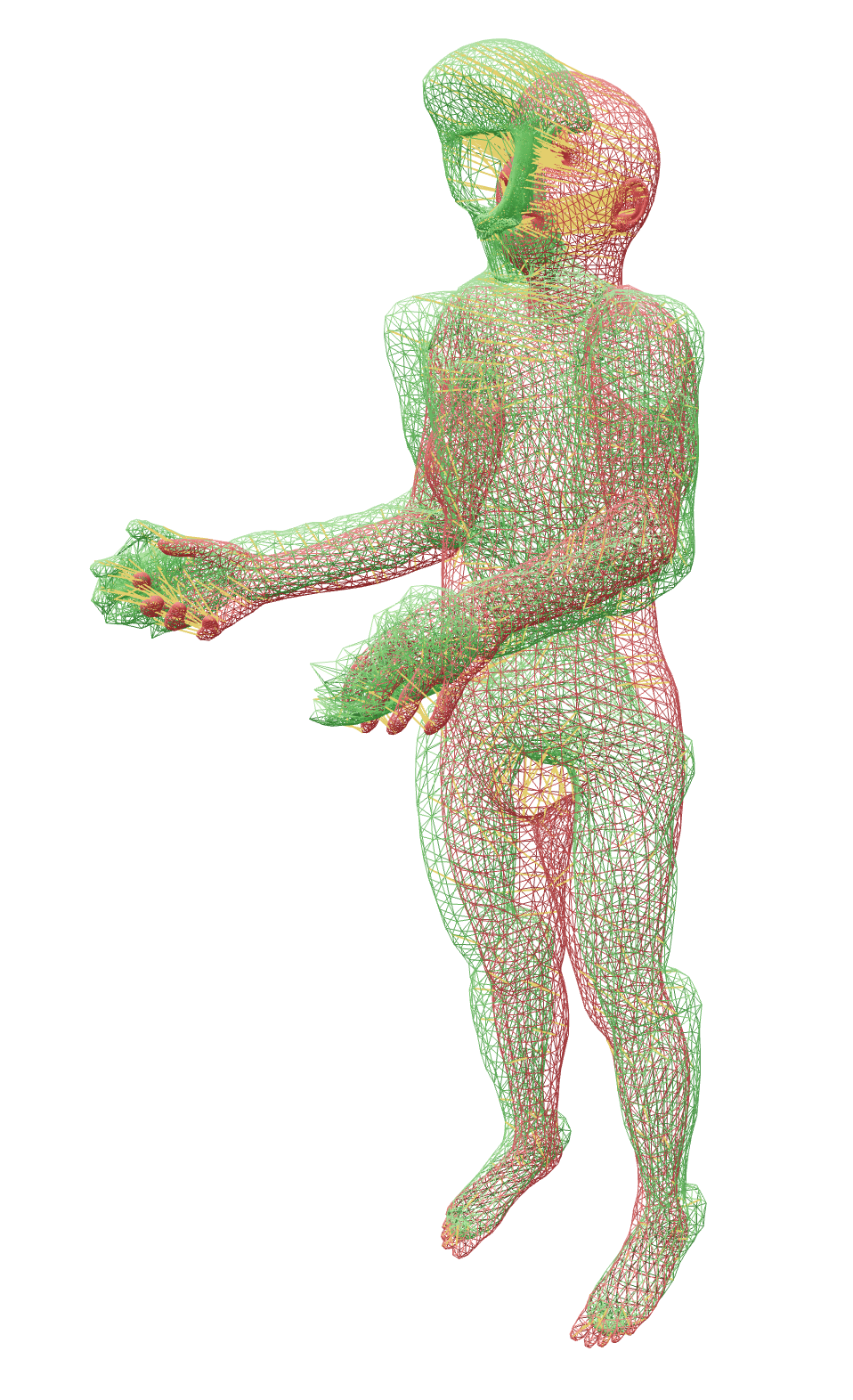
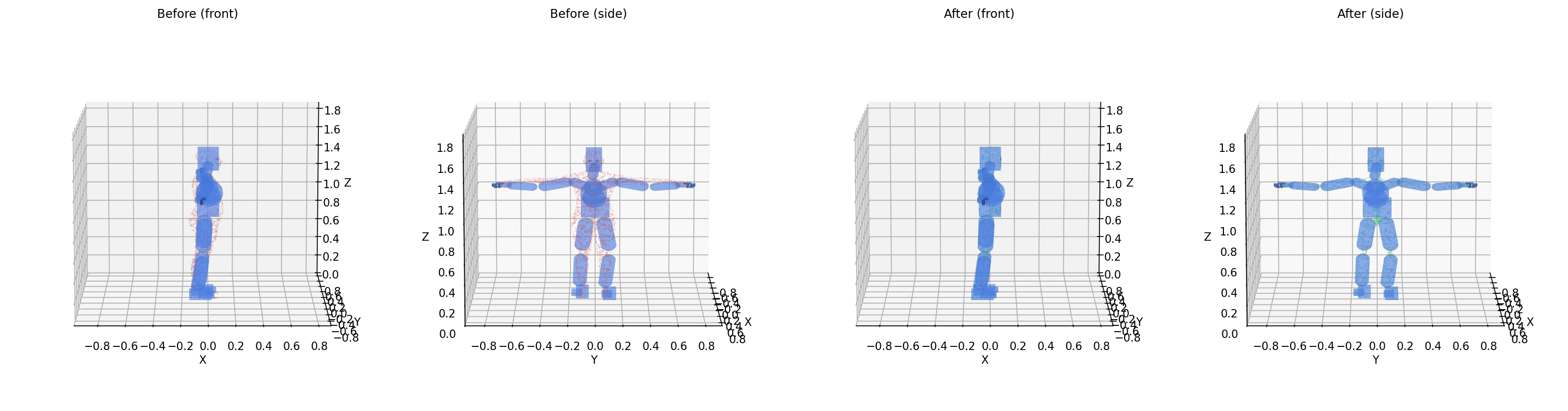
SMPLX Capsule Registration
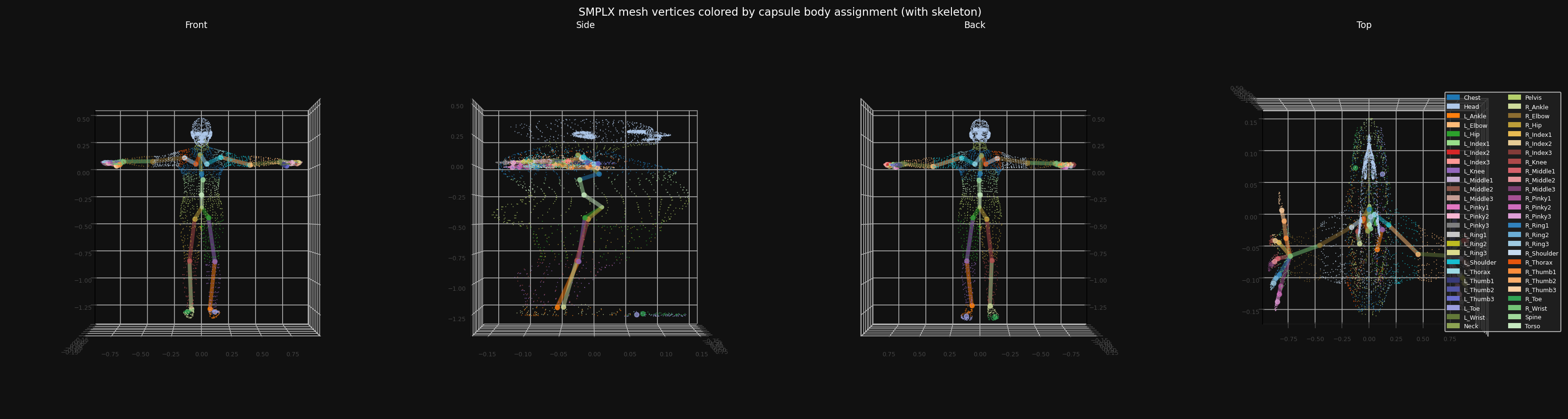
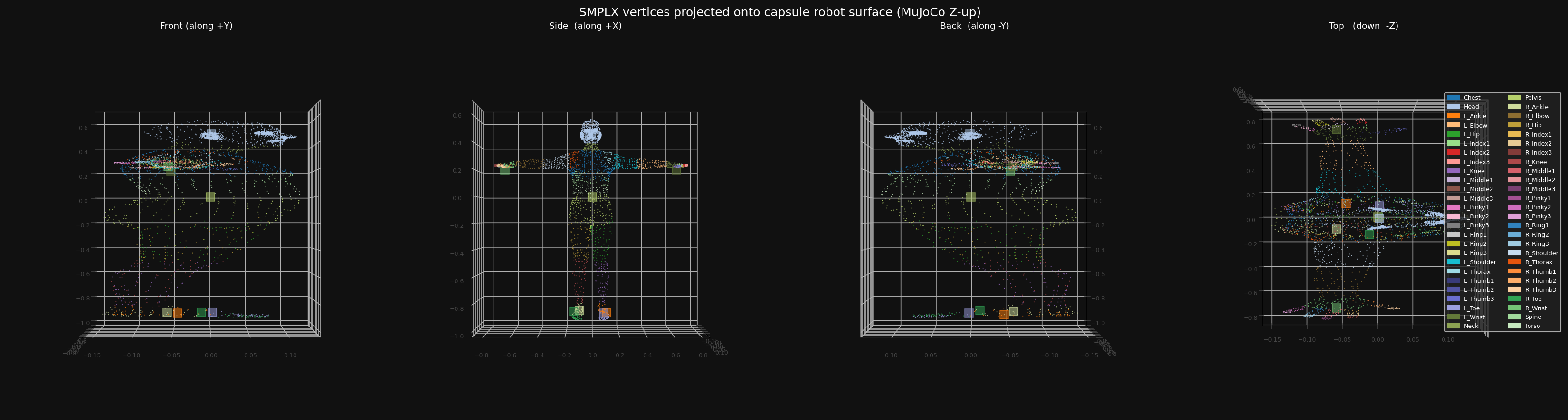
SMPLX to Capsule Projection